ROBOTIC GRIPPER
2020 semester 2 university project [MECHENG736]TEAM NAME: group #8TEAM MEMBERS: KUAN CHEN, Tarin Eccleston, Elizabeth KulasinghamCompleted.
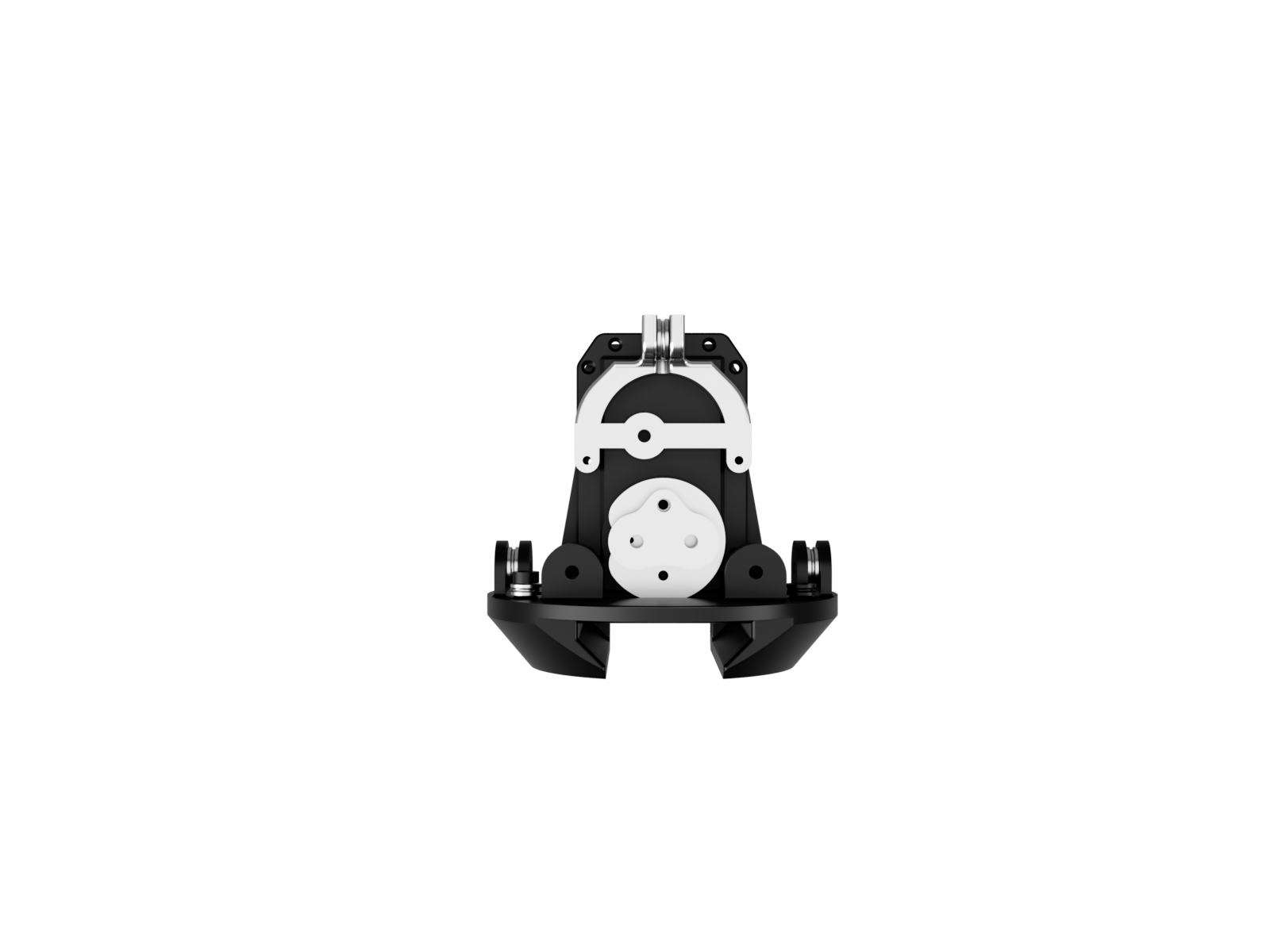
A Pivot-Pivot, underactuated and low-cost two-finger gripper has been developed. This gripper is designed to grasp a selection of 8 objects through a variety of orientations. The design features a PLA body/fingers, Dragon Skin-10 silicone finger pads, a custom pulley differential all actuated via a single Dynamixel smart motor. The gripper was able to grasp 7/8 objects, with failure on the 1.5L water bottle.